10.1.5. free_rtos基础知识体系梳理
FreeRTOS 在线手册 https://freertos.asicfans.com/
单任务系统
单任务系统中主要采用超级循环系统(前后台系统),应用程序是一个无限的循环,循环中调用相应的函数完成相应的操作, 这部分可以看作后台行为.中断服务程序处理异步时间,这部分可以看作前台行为.后台也可以叫做任务级,前台也叫做中断级
前后台系统编程主要有两种思路:轮询方式(实时性不能得到保障),中断方式
中断与轮循结合的方式可以解决很多裸机应用,但随着系统的复杂,裸机的缺点就暴露出来了
ISR函数变得非常复杂,并且需要很长的执行时间.当ISR嵌套可能会产生不可预测的执行时间和堆栈需求
超级循环与ISR之间的数据交换通过全局变量进行.
超级循环使得应用程序变得复杂,可扩展性差
多任务系统
采用多任务系统可以解决裸机开发中的几个缺点
freertos是一款支持多任务运行的实时操作系统,具有时间片,抢占式和合作式三种调度方式.
10.1.5.1. 任务堆栈
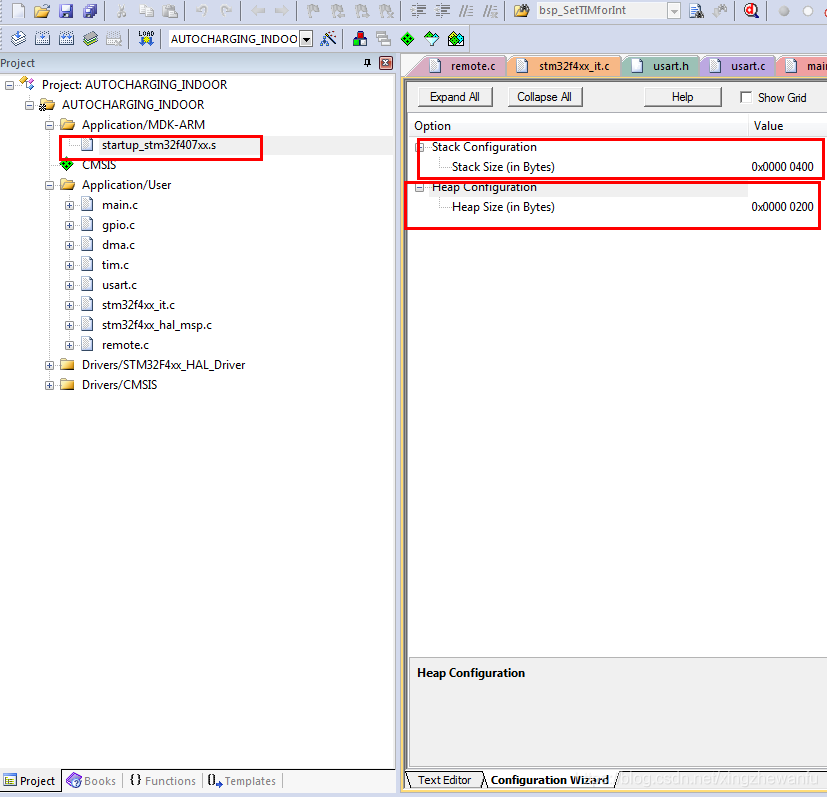
上图中显示栈与堆空间的设置
备注
在freertos操作系统中,主堆栈指针MSP是给系统栈空间使用的,进程栈指针PSP是给任务栈使用的.也就是说freertos任务中,所有栈空间的使用 都是通过PSP指针进行指向的.实际应用中系统栈空间分配多大,主要看可能发生的中断嵌套层数.
10.1.5.1.1. 任务栈大小确定
函数的栈大小计算起来是比较麻烦的,一般IDE开发环境都会有这样的一个功能,比如MDK会生成一个htm文件.用户可以通过这个文件知道每个被调用 函数的最大栈需求以及各个函数的调用关系.但是MDK无法确定通过函数指针实现函数调用时的栈需求.另外,发生中断或者中断嵌套时的现场保护需要 的栈空间也不会统计
10.1.5.1.2. 栈溢出检测机制
栈的生长方向一般是从高地址向地址生长的
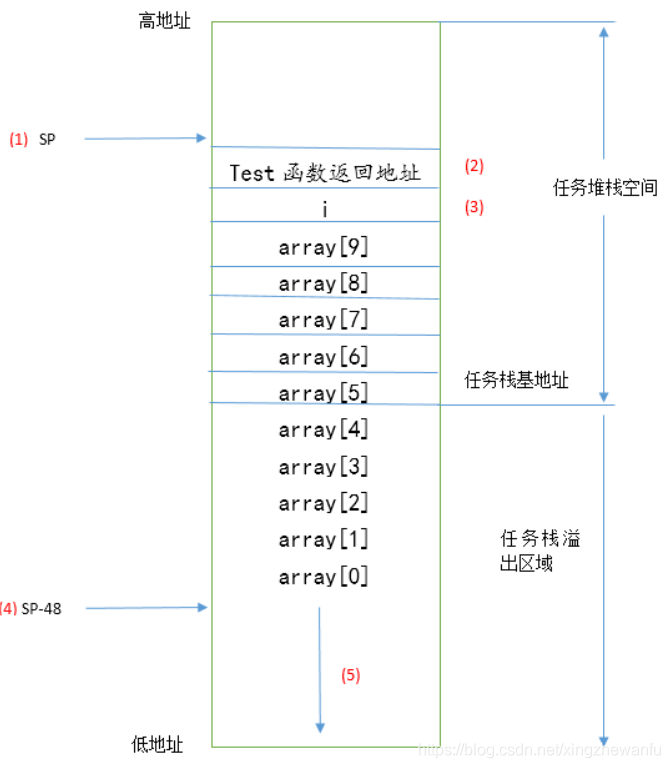
上图中array数组的申请就发生来栈溢出
FreeRTOS提供了两种栈溢出检测机制,这两种检测都是任务切换时才会进行
1) 在任务切换时检测任务栈指针是否越界了,如果越界来,在任务切换时会触发栈溢出钩子函数.用户可以在钩子函数里面做一些处理.这种方法不能保证 所有的栈溢出都能检测到.比如在任务执行过程中出现过栈溢出,任务切换前栈指针又恢复到了正常水平.
使用这种方法时用户需要在FreeRTOSConfig.h文件中配置如下宏定义
#define configCHECK_FOR_STACK_OVERFLOW 1
2) 任务创建的时候将任务栈的所有数据初始化为0xa5,任务切换时进行任务栈检测,检查末尾的16个字节是否都是0xa5,通过这种方式来检测任务栈是否溢出了, 相比方法一这种方法速度稍微慢些,但有效的避免了方法一中的某些情况.但还是不能检测所有任务栈溢出情况,比如发生栈溢出来,但是末尾的16个字节没有 修改,但是修改了溢出部分的数据
使用这种方法时用户需要在FreeRTOSConfig.h文件中配置如下宏定义
#define configCHECK_FOR_STACK_OVERFLOW 2
10.1.5.2. 任务状态
备注
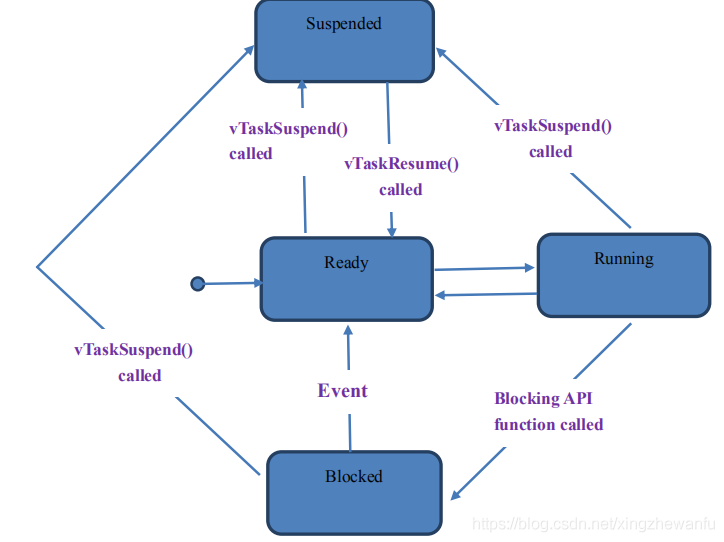
FreeRTOS的任务状态(4种):运行态(running),就绪态(ready),阻塞态(blocked),挂起态(suspended) ucos任务状态(5种):睡眠状态,就绪状态,等待状态,中断服务状态,执行状态
运行态(running): 任务处于实际运行状态,即CPU的使用权被这个任务占用
就绪态(ready): 指那些能够运行(没有阻塞或者挂起)但是当前没有运行的任务,因为同优先级或更高优先级的任务正在运行
阻塞态(blocked): 由于等待信号量,消息队列,事件标志等处于的状态成为阻塞态,另外任务调用延迟函数也会处于阻塞态
挂起态(suspended): 类似阻塞态,通过调用函数vTaskSuspend()对指定任务进行挂起,挂起后这个任务将不被执行,只有调用xTaskResume()才可以将这个任务从挂起状态恢复
10.1.5.3. 任务优先级
FreeRTOS中任务最高优先级是通过
FreeRTOSConfig.h文件中的configMAX_PRIORITIES进行配置的.用户可以使用的优先级范围是0~configMAX_PRIORITIES用户配置的优先级数值越小,任务优先级越低.空闲任务的优先级是0
configMAX_PRIORITIES建议最大值不超过32

IRQ任务: 指中断服务程序触发的任务,此类任务应该设置为所有任务里面优先级最高的
备注
IRQ任务和高优先级任务必须设置为阻塞式(调用消息等待或延迟函数),只有这样高优先级的任务才会释放CPU的使用权,从而 低优先级的任务才会有机会执行
10.1.5.4. 任务调度
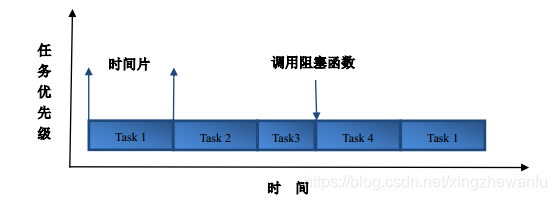
FreeRTOS是一款支持多任务运行的实时操作系统,具有时间片,抢占式,合作式三种调度方式
合作式调度,主要用在资源有限的设备上面,现在基本不用了
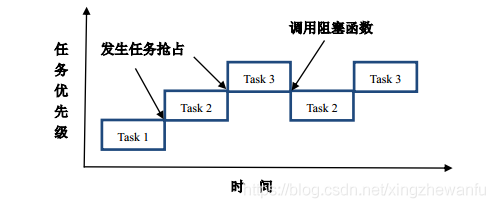
抢占式调度,每个任务都有不同的优先级,任务会一直运行到被高优先级的任务抢占或者遇到阻塞式的API函数
时间片调度,每个任务都有相同的优先级,任务会运行固定的时间片个数或者遇到阻塞式API函数
10.1.5.4.1. 调度器
调度器就是使用相关的调度算法来决定当前需要执行的任务,所有的调度器有一个共同的特性:
调度器可以区分就绪态任务和挂起任务(延迟,信号量等待等原因挂起的任务), 调度器可以选择就绪态中的一个任务,然后激活它
抢占式调度器
时间片调度器
在小型的嵌入式RTOS中,最常用的时间片调度算法就是Round-robin调度算法.
用户需要在 FreeRTOSConfig.h 文件中使能宏定义
#define configUSE_TIME_SLICING 1
10.1.5.5. 临界区,锁与系统时间
代码的临界区,一旦这部分代码开始执行,则不允许任何中断打断.为了保证这部分代码不被中断,需要进行关中断操作
锁
调度锁: 调度锁就是RTOS提供的调度器开关函数,如果某个任务调用了调度锁开关函数,处于调度锁开关之间的代码在执行期间不会被高优先级的任务抢占,但中断是可以执行的
任务锁: 为了防止当前任务的执行被其他高优先级的任务.FreeRTOS没有专门的任务锁函数,有以下两种实现方A.通过调度器加锁实现B.关闭任务切换中断PendSV和系统Systick
任何操作系统都需要提供一个时钟节拍,以供系统处理注入延迟,超时等时间相关的事件.时钟节拍是特定的周期性中断,这个中断可以看成是系统心跳, 系统节拍越快,系统的额外开销就越大. MCU中一般采用滴答定时器来实现系统时钟节拍