2.2. source analysis
2.2.1. 目录结构
board: 开发板相关目录,平台依赖
arch: CPU相关目录,平台依赖
include: 头文件目录,开发板的配置文件也在其中,configs存放开发板配置文件
common: 通用多功能函数实现
cmd: cmd命令实现
drivers: 通用设备驱动程序,包括以太网,flash驱动等
fs: 文件系统支持
lib: 通用库函数实现
net: 网络相关工具,如tftp,nfs
tool: 用于创建u-boot s-record和bin镜像文件的工具
script: 脚本
u-boot目录可分为3类:
处理器体系结构或开发板硬件直接相关的
通用函数或者驱动程序
u-boot应用程序、工具或者文档
2.2.2. 重要文件
include/configs/holo_ark_v3.h
开发板配置文件,包含spl loader配置信息,环境变量配置信息,地址配置信息等
arch/arm/cpu/armv8/u-boot.lds
程序链接脚本,定义程序入口entry(_start),并安排各程序段衔接位置,程序首先运行start.s文件。
arch/arm/cpu/armv8/start.S
程序首先运行的文件,程序刚开始运行的汇编代码,完成基本初始化。
arch/arm/cpu/armv8/lowlevel_init.S
内存初始化,clock、SDRAM初始化代码(bootstrap中已完成,不执行)
board/holomatic/holo_ark_v3/board.c
C语言入口start
common/main.c
main_loop()定义于此。
arch/arm/lib/interrupts.c
中断相关函数
main_loop()在没有字符输入的情况下。执行autoboot_command函数,boot kernel
u-boot 实际主要运行的三个位置:
_start----->start_armboot-------->main_loop
2.2.3. 生成文件
System.map: uboot映像符号表,它包含了uboot全局变量和函数的地址信息。可供用户查看或由外部程序调试使用
uboot.bin: uboot映像原始二进制文件。
uboot: uboot映像elf格式文件。
uboot.srec: uboot映像的s_record格式。
注:uboot和uboot.srec格式都自带定位信息
tool/mkimge可转换为其他格式印象
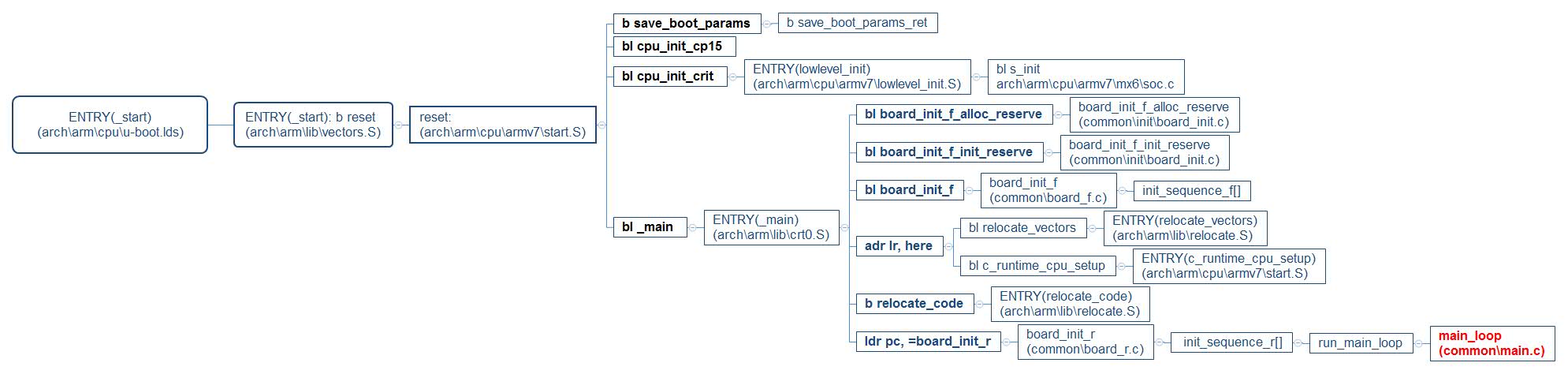
2.2.4. u-boot启动流程
嵌入式系统启动的基本流程是这样的:
RoomBoot—>SPL—>u-boot—>linux kernel—>file system——>start application
RoomBoot 是固化在芯片内部的代码,负责从各种外(sdcard、mmc、flash、)中加载spl到芯片内部的SRAM
SPL的主要工作是初始化板载的DDRAM,然后将u-boot搬运到DDRAM中
u-boot最主要的功能就是加载启动linux kernel
spl一般是地址无关的,设计成地址无关的主要目的是为了保证SPL被搬运到任何地方都能运行,这样设计是因为我们不知道spl会被放到 哪个地址运行。
位置无关码究其原因,主要是编译生成的汇编代码都是相对地址。
启动流程图如下,不同平台之间略有差别
2.2.4.1. SPL启动流程分析
spl的入口代码是在arch/arm/lib/vector.S中的 _start 函数
_start
.macro ARM_VECTORS
#ifdef CONFIG_ARCH_K3
ldr pc, _reset
#else
b reset
#endif
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
.endm
_start:
#ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
.word CONFIG_SYS_DV_NOR_BOOT_CFG
#endif
ARM_VECTORS
#endif /* !defined(CONFIG_ENABLE_ARM_SOC_BOOT0_HOOK) */
_start中直接执行reset
ldr pc, _xx定义的是中断的处理方式,类似中断向量表
备注
spl阶段是不允许中断的,u-boot可以
reset
代码路径:arch/arm/cpu/armv8/start.S
reset:
/* Allow the board to save important registers */
b save_boot_params
.globl save_boot_params_ret
save_boot_params_ret:
#if CONFIG_POSITION_INDEPENDENT
/*
* Fix .rela.dyn relocations. This allows U-Boot to be loaded to and
* executed at a different address than it was linked at.
*/
pie_fixup:
adr x0, _start /* x0 <- Runtime value of _start */
ldr x1, _TEXT_BASE /* x1 <- Linked value of _start */
sub x9, x0, x1 /* x9 <- Run-vs-link offset */
adr x2, __rel_dyn_start /* x2 <- Runtime &__rel_dyn_start */
adr x3, __rel_dyn_end /* x3 <- Runtime &__rel_dyn_end */
pie_fix_loop:
ldp x0, x1, [x2], #16 /* (x0, x1) <- (Link location, fixup) */
ldr x4, [x2], #8 /* x4 <- addend */
cmp w1, #1027 /* relative fixup? */
bne pie_skip_reloc
/* relative fix: store addend plus offset at dest location */
add x0, x0, x9
add x4, x4, x9
str x4, [x0]
pie_skip_reloc:
cmp x2, x3
b.lo pie_fix_loop
pie_fixup_done:
#endif
#ifdef CONFIG_SYS_RESET_SCTRL
bl reset_sctrl
#endif
#if defined(CONFIG_ARMV8_SPL_EXCEPTION_VECTORS) || !defined(CONFIG_SPL_BUILD)
.macro set_vbar, regname, reg
msr \regname, \reg
.endm
adr x0, vectors
#else
.macro set_vbar, regname, reg
.endm
#endif
/*
* Could be EL3/EL2/EL1, Initial State:
* Little Endian, MMU Disabled, i/dCache Disabled
*/
switch_el x1, 3f, 2f, 1f
3: set_vbar vbar_el3, x0
mrs x0, scr_el3
orr x0, x0, #0xf /* SCR_EL3.NS|IRQ|FIQ|EA */
msr scr_el3, x0
msr cptr_el3, xzr /* Enable FP/SIMD */
#ifdef COUNTER_FREQUENCY
ldr x0, =COUNTER_FREQUENCY
msr cntfrq_el0, x0 /* Initialize CNTFRQ */
#endif
b 0f
2: set_vbar vbar_el2, x0
mov x0, #0x33ff
msr cptr_el2, x0 /* Enable FP/SIMD */
b 0f
1: set_vbar vbar_el1, x0
mov x0, #3 << 20
msr cpacr_el1, x0 /* Enable FP/SIMD */
0:
/*
* Enable SMPEN bit for coherency.
* This register is not architectural but at the moment
* this bit should be set for A53/A57/A72.
*/
#ifdef CONFIG_ARMV8_SET_SMPEN
switch_el x1, 3f, 1f, 1f
3:
mrs x0, S3_1_c15_c2_1 /* cpuectlr_el1 */
orr x0, x0, #0x40
msr S3_1_c15_c2_1, x0
1:
#endif
/* Apply ARM core specific erratas */
bl apply_core_errata
/*
* Cache/BPB/TLB Invalidate
* i-cache is invalidated before enabled in icache_enable()
* tlb is invalidated before mmu is enabled in dcache_enable()
* d-cache is invalidated before enabled in dcache_enable()
*/
/* Processor specific initialization */
bl lowlevel_init
#if defined(CONFIG_ARMV8_SPIN_TABLE) && !defined(CONFIG_SPL_BUILD)
branch_if_master x0, x1, master_cpu
b spin_table_secondary_jump
/* never return */
#elif defined(CONFIG_ARMV8_MULTIENTRY)
branch_if_master x0, x1, master_cpu
/*
* Slave CPUs
*/
slave_cpu:
wfe
ldr x1, =CPU_RELEASE_ADDR
ldr x0, [x1]
cbz x0, slave_cpu
br x0 /* branch to the given address */
#endif /* CONFIG_ARMV8_MULTIENTRY */
master_cpu:
bl _main
主要设置CPU的工作模式,禁用FIQ,IRQ。然后跳转到 lowlevel_init 中,然后跳转到 _main
lowlevel_init
代码路径:arch/arm/cpu/armv8/lowlevel_init.S
ENTRY(lowlevel_init)
/*
* Setup a temporary stack. Global data is not available yet.
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr w0, =CONFIG_SPL_STACK
#else
ldr w0, =CONFIG_SYS_INIT_SP_ADDR
#endif
bic sp, x0, #0xf /* 16-byte alignment for ABI compliance */
/*
* Save the old LR(passed in x29) and the current LR to stack
*/
stp x29, x30, [sp, #-16]!
/*
* Call the very early init function. This should do only the
* absolute bare minimum to get started. It should not:
*
* - set up DRAM
* - use global_data
* - clear BSS
* - try to start a console
*
* For boards with SPL this should be empty since SPL can do all of
* this init in the SPL board_init_f() function which is called
* immediately after this.
*/
bl s_init
ldp x29, x30, [sp]
ret
ENDPROC(lowlevel_init)
设置栈指针
确保sp 16字节对齐
跳转到s_init中
_main
代码路径: arch/arm/lib/crt0_64.S
ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
*/
#if defined(CONFIG_TPL_BUILD) && defined(CONFIG_TPL_NEEDS_SEPARATE_STACK)
ldr x0, =(CONFIG_TPL_STACK)
#elif defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr x0, =(CONFIG_SPL_STACK)
#elif defined(CONFIG_INIT_SP_RELATIVE)
adr x0, __bss_start
add x0, x0, #CONFIG_SYS_INIT_SP_BSS_OFFSET
#else
ldr x0, =(CONFIG_SYS_INIT_SP_ADDR)
#endif
bic sp, x0, #0xf /* 16-byte alignment for ABI compliance */
mov x0, sp
bl board_init_f_alloc_reserve
mov sp, x0
/* set up gd here, outside any C code */
mov x18, x0
bl board_init_f_init_reserve
mov x0, #0
bl board_init_f
#if !defined(CONFIG_SPL_BUILD)
/*
* Set up intermediate environment (new sp and gd) and call
* relocate_code(addr_moni). Trick here is that we'll return
* 'here' but relocated.
*/
ldr x0, [x18, #GD_START_ADDR_SP] /* x0 <- gd->start_addr_sp */
bic sp, x0, #0xf /* 16-byte alignment for ABI compliance */
ldr x18, [x18, #GD_NEW_GD] /* x18 <- gd->new_gd */
adr lr, relocation_return
#if CONFIG_POSITION_INDEPENDENT
/* Add in link-vs-runtime offset */
adr x0, _start /* x0 <- Runtime value of _start */
ldr x9, _TEXT_BASE /* x9 <- Linked value of _start */
sub x9, x9, x0 /* x9 <- Run-vs-link offset */
add lr, lr, x9
#endif
/* Add in link-vs-relocation offset */
ldr x9, [x18, #GD_RELOC_OFF] /* x9 <- gd->reloc_off */
add lr, lr, x9 /* new return address after relocation */
ldr x0, [x18, #GD_RELOCADDR] /* x0 <- gd->relocaddr */
b relocate_code
relocation_return:
/*
* Set up final (full) environment
*/
bl c_runtime_cpu_setup /* still call old routine */
#endif /* !CONFIG_SPL_BUILD */
#if !defined(CONFIG_SPL_BUILD) || CONFIG_IS_ENABLED(FRAMEWORK)
#if defined(CONFIG_SPL_BUILD)
bl spl_relocate_stack_gd /* may return NULL */
/* set up gd here, outside any C code, if new stack is returned */
cmp x0, #0
csel x18, x0, x18, ne
/*
* Perform 'sp = (x0 != NULL) ? x0 : sp' while working
* around the constraint that conditional moves can not
* have 'sp' as an operand
*/
mov x1, sp
cmp x0, #0
csel x0, x0, x1, ne
mov sp, x0
#endif
/*
* Clear BSS section
*/
ldr x0, =__bss_start /* this is auto-relocated! */
ldr x1, =__bss_end /* this is auto-relocated! */
clear_loop:
str xzr, [x0], #8
cmp x0, x1
b.lo clear_loop
/* call board_init_r(gd_t *id, ulong dest_addr) */
mov x0, x18 /* gd_t */
ldr x1, [x18, #GD_RELOCADDR] /* dest_addr */
b board_init_r /* PC relative jump */
/* NOTREACHED - board_init_r() does not return */
#endif
ENDPROC(_main)
_main 所做的工作都是为调用C函数做前期的准备,这个C函数就是 board_init_f
重新对sp赋值,确认是16字节对齐
board_init_f_alloc_reserve board_init_f_init_reserve C函数在栈顶保留一个global_data的大小,这个global_data是u-boot里面的一个全局数据 很多地方都会用到,俗称gd_t
跳转到board_init_r
board_init_r
代码路径: common/spl/spl.c
void board_init_r(gd_t *dummy1, ulong dummy2)
{
int ret;
u32 spl_boot_list[] = {
BOOT_DEVICE_NONE,
BOOT_DEVICE_NONE,
BOOT_DEVICE_NONE,
BOOT_DEVICE_NONE,
BOOT_DEVICE_NONE,
};
struct spl_image_info spl_image;
debug(">>" SPL_TPL_PROMPT "board_init_r()\n");
spl_set_bd();
#if defined(CONFIG_SYS_SPL_MALLOC_START)
mem_malloc_init(CONFIG_SYS_SPL_MALLOC_START, CONFIG_SYS_SPL_MALLOC_SIZE);
gd->flags |= GD_FLG_FULL_MALLOC_INIT;
#endif
if (!(gd->flags & GD_FLG_SPL_INIT)) {
if (spl_init()) {
hang();
}
}
#if !defined(CONFIG_PPC) && !defined(CONFIG_ARCH_MX6)
timer_init();
#endif
if (CONFIG_IS_ENABLED(BLOBLIST)) {
ret = bloblist_init();
if (ret) {
debug("%s: Failed to set up bloblist: ret=%d\n", __func__, ret);
puts(SPL_TPL_PROMPT "Cannot set up bloblist\n");
hang();
}
}
if (CONFIG_IS_ENABLED(HANDOFF)) {
ret = setup_spl_handoff();
if (ret) {
puts(SPL_TPL_PROMPT "Cannot set up SPL handoff\n");
hang();
}
}
#if CONFIG_IS_ENABLED(BOARD_INIT)
spl_board_init();
#endif
#if defined(CONFIG_SPL_WATCHDOG_SUPPORT) && CONFIG_IS_ENABLED(WDT)
initr_watchdog();
#endif
if (IS_ENABLED(CONFIG_SPL_OS_BOOT) || CONFIG_IS_ENABLED(HANDOFF)) {
dram_init_banksize();
}
bootcount_inc();
memset(&spl_image, '\0', sizeof(spl_image));
#ifdef CONFIG_SYS_SPL_ARGS_ADDR
spl_image.arg = (void *)CONFIG_SYS_SPL_ARGS_ADDR;
#endif
spl_image.boot_device = BOOT_DEVICE_NONE;
board_boot_order(spl_boot_list);
if (boot_from_devices(&spl_image, spl_boot_list, ARRAY_SIZE(spl_boot_list))) {
puts(SPL_TPL_PROMPT "failed to boot from all boot devices\n");
hang();
}
spl_perform_fixups(&spl_image);
if (CONFIG_IS_ENABLED(HANDOFF)) {
ret = write_spl_handoff();
if (ret) {
printf(SPL_TPL_PROMPT "SPL hand-off write failed (err=%d)\n", ret);
}
}
if (CONFIG_IS_ENABLED(BLOBLIST)) {
ret = bloblist_finish();
if (ret) {
printf("Warning: Failed to finish bloblist (ret=%d)\n", ret);
}
}
#ifdef CONFIG_CPU_V7M
spl_image.entry_point |= 0x1;
#endif
switch (spl_image.os) {
case IH_OS_U_BOOT:
debug("Jumping to U-Boot\n");
break;
#if CONFIG_IS_ENABLED(ATF)
case IH_OS_ARM_TRUSTED_FIRMWARE:
debug("Jumping to U-Boot via ARM Trusted Firmware\n");
spl_invoke_atf(&spl_image);
break;
#endif
#if CONFIG_IS_ENABLED(OPTEE)
case IH_OS_TEE:
debug("Jumping to U-Boot via OP-TEE\n");
spl_optee_entry(NULL, NULL, spl_image.fdt_addr, (void *)spl_image.entry_point);
break;
#endif
#if CONFIG_IS_ENABLED(OPENSBI)
case IH_OS_OPENSBI:
debug("Jumping to U-Boot via RISC-V OpenSBI\n");
spl_invoke_opensbi(&spl_image);
break;
#endif
#ifdef CONFIG_SPL_OS_BOOT
case IH_OS_LINUX:
debug("Jumping to Linux\n");
spl_fixup_fdt();
spl_board_prepare_for_linux();
jump_to_image_linux(&spl_image);
#endif
default:
debug("Unsupported OS image.. Jumping nevertheless..\n");
}
#if CONFIG_VAL(SYS_MALLOC_F_LEN) && !defined(CONFIG_SYS_SPL_MALLOC_SIZE)
debug("SPL malloc() used 0x%lx bytes (%ld KB)\n", gd->malloc_ptr, gd->malloc_ptr / 1024);
#endif
bootstage_mark_name(spl_phase() == PHASE_TPL ? BOOTSTAGE_ID_END_TPL : BOOTSTAGE_ID_END_SPL, "end " SPL_TPL_NAME);
#ifdef CONFIG_BOOTSTAGE_STASH
ret = bootstage_stash((void *)CONFIG_BOOTSTAGE_STASH_ADDR, CONFIG_BOOTSTAGE_STASH_SIZE);
if (ret) {
debug("Failed to stash bootstage: err=%d\n", ret);
}
#endif
debug("loaded - jumping to U-Boot...\n");
spl_board_prepare_for_boot();
jump_to_image_no_args(&spl_image);
}
mem_malloc_init 进行memory的malloc池初始化,以后调用malloc就在这个池子中分配内存
spl_init 包括fdt log等前期初始化工作
timer_init 定时器初始化
spl_board_init 根据配置选项完成相应的spl阶段外设初始化,包括console i2c misc watchdog
boot_from_devices 设置从哪个外部设备启动(NAND SDCARD NOR)
将image从外部设备load到ram中
判断image类型,如果是uboot则break,去运行u-boot。如果是linux则启动linux(说明:spl可以直接启动linux)
至此,SPL结束它的生命,控制权交给uboot或者linux
2.2.4.2. u-boot 启动流程分析
从编译系统可知,u-boo.bin的入口代码是arch/arm/lib/vectors.S中的_start函数
_start
代码路径: arch/arm/lib/vectors.S
与SPL的执行流程基本一直,不同的地方是u-boot.bin阶段会负责处理异常中断。_start会跳转到reset
reset
代码路径 arch/arm/cpu/armv8/start.S
与spl的reset执行流程一致。reset会跳转到_main
_main
代码路径: arch/arm/lib/crt0_64.S
前一部分与spl的执行基本一致,board_init_f函数的调用会有不同。两个阶段调用的函数名虽然都是一样的,但实现的文件是不同的。 spl的board_init_f是在arch/arm/lib/spl.c中实现的,而u-boot.bin阶段是在arch/arm/mach-k3/j721e_init.c中实现的,这个不同是由 编译阶段决定的。
第二部分主要的事情是 relocate_code
u-boot.bin 的链接地址是在编译阶段决定的,假设这个链接地址是0x20000000,SPL在load uboot.bin的时候,需要把它load到这个地址,然后 jump到这个地址运行。
注意:u-boot.bin是地址相关的,只有link address,load address , run address这三者一致才可正常运行。当代码运行到 b relocate_code
这个位置时,代表u-boot.bin已经被加约定地址。
relocate_code意思时把u-boot.bin余下部分的code全部搬运到另外一个地址运行。
relocate_code 代码在arch/arm/lib/relocate_64.S中实现
第三部分是 board_init_r,该函数的实现在/common/board_r.c 中。
board_init_f
代码路径: arch/arm/mach-k3/j721e_init.c
void board_init_f(ulong dummy)
{
#if defined(CONFIG_K3_J721E_DDRSS) || defined(CONFIG_K3_LOAD_SYSFW)
int ret;
struct udevice *dev;
#endif
store_boot_index_from_rom();
ctrl_mmr_unlock();
#ifdef CONFIG_CPU_V7R
disable_linefill_optimization();
setup_k3_mpu_regions();
#endif
spl_early_init();
#ifdef CONFIG_K3_LOAD_SYSFW
ret = uclass_find_device_by_seq(UCLASS_SERIAL, 0, true, &dev);
if (!ret) {
pinctrl_select_state(dev, "default");
}
/*
* Load, start up, and configure system controller firmware. Provide
* the U-Boot console init function to the SYSFW post-PM configuration
* callback hook, effectively switching on (or over) the console
* output.
*/
k3_sysfw_loader(k3_mmc_stop_clock, k3_mmc_restart_clock);
/* Prepare console output */
preloader_console_init();
/* Disable ROM configured firewalls right after loading sysfw */
#ifdef CONFIG_TI_SECURE_DEVICE
remove_fwl_configs(cbass_hc_cfg0_fwls, ARRAY_SIZE(cbass_hc_cfg0_fwls));
remove_fwl_configs(cbass_hc0_fwls, ARRAY_SIZE(cbass_hc0_fwls));
remove_fwl_configs(cbass_rc_cfg0_fwls, ARRAY_SIZE(cbass_rc_cfg0_fwls));
remove_fwl_configs(cbass_rc0_fwls, ARRAY_SIZE(cbass_rc0_fwls));
remove_fwl_configs(infra_cbass0_fwls, ARRAY_SIZE(infra_cbass0_fwls));
remove_fwl_configs(mcu_cbass0_fwls, ARRAY_SIZE(mcu_cbass0_fwls));
remove_fwl_configs(wkup_cbass0_fwls, ARRAY_SIZE(wkup_cbass0_fwls));
#endif
#else
/* Prepare console output */
preloader_console_init();
#endif
#if defined(CONFIG_TARGET_J721E_A72_EVM) || defined(CONFIG_TARGET_J721E_R5_EVM)
/* Perform EEPROM-based board detection */
do_board_detect();
#endif
#if defined(CONFIG_CPU_V7R) && defined(CONFIG_K3_AVS0)
ret = uclass_get_device_by_driver(UCLASS_MISC, DM_GET_DRIVER(k3_avs), &dev);
if (ret) {
printf("AVS init failed: %d\n", ret);
}
#endif
#if defined(CONFIG_K3_J721E_DDRSS)
ret = uclass_get_device(UCLASS_RAM, 0, &dev);
if (ret) {
panic("DRAM init failed: %d\n", ret);
}
#endif
}
设置CPU工作状态
load u-boot.bin,可以从mmc DFU或者UART获取到
console初始化
board_init_r
代码路径: common/board_r.c
void board_init_r(gd_t *new_gd, ulong dest_addr)
{
/*
* Set up the new global data pointer. So far only x86 does this
* here.
* TODO(sjg@chromium.org): Consider doing this for all archs, or
* dropping the new_gd parameter.
*/
#if CONFIG_IS_ENABLED(X86_64)
arch_setup_gd(new_gd);
#endif
#ifdef CONFIG_NEEDS_MANUAL_RELOC
int i;
#endif
#if !defined(CONFIG_X86) && !defined(CONFIG_ARM) && !defined(CONFIG_ARM64)
gd = new_gd;
#endif
gd->flags &= ~GD_FLG_LOG_READY;
#ifdef CONFIG_NEEDS_MANUAL_RELOC
for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++)
init_sequence_r[i] += gd->reloc_off;
#endif
if (initcall_run_list(init_sequence_r))
hang();
/* NOTREACHED - run_main_loop() does not return */
hang();
}
board_init_r中一个重要的函数是 initcall_run_list(init_sequrnce_r) ,此函数会顺序调用 init_sequence_r 中的
函数列表。如下
static init_fnc_t init_sequence_r[] = {
initr_trace,
initr_reloc,
/* TODO: could x86/PPC have this also perhaps? */
#ifdef CONFIG_ARM
initr_caches,
/* Note: For Freescale LS2 SoCs, new MMU table is created in DDR.
* A temporary mapping of IFC high region is since removed,
* so environmental variables in NOR flash is not available
* until board_init() is called below to remap IFC to high
* region.
*/
#endif
initr_reloc_global_data,
#if defined(CONFIG_SYS_INIT_RAM_LOCK) && defined(CONFIG_E500)
initr_unlock_ram_in_cache,
#endif
initr_barrier,
initr_malloc,
log_init,
initr_bootstage, /* Needs malloc() but has its own timer */
initr_console_record,
#ifdef CONFIG_SYS_NONCACHED_MEMORY
initr_noncached,
#endif
#ifdef CONFIG_OF_LIVE
initr_of_live,
#endif
#ifdef CONFIG_DM
initr_dm,
#endif
#if defined(CONFIG_ARM) || defined(CONFIG_NDS32) || defined(CONFIG_RISCV) || \
defined(CONFIG_SANDBOX)
board_init, /* Setup chipselects */
#endif
/*
* TODO: printing of the clock inforamtion of the board is now
* implemented as part of bdinfo command. Currently only support for
* davinci SOC's is added. Remove this check once all the board
* implement this.
*/
#ifdef CONFIG_CLOCKS
set_cpu_clk_info, /* Setup clock information */
#endif
#ifdef CONFIG_EFI_LOADER
efi_memory_init,
#endif
initr_binman,
#ifdef CONFIG_FSP_VERSION2
arch_fsp_init_r,
#endif
initr_dm_devices,
stdio_init_tables,
initr_serial,
initr_announce,
#if CONFIG_IS_ENABLED(WDT)
initr_watchdog,
#endif
INIT_FUNC_WATCHDOG_RESET
#ifdef CONFIG_NEEDS_MANUAL_RELOC
initr_manual_reloc_cmdtable,
#endif
#if defined(CONFIG_PPC) || defined(CONFIG_M68K) || defined(CONFIG_MIPS)
initr_trap,
#endif
#ifdef CONFIG_ADDR_MAP
initr_addr_map,
#endif
#if defined(CONFIG_BOARD_EARLY_INIT_R)
board_early_init_r,
#endif
INIT_FUNC_WATCHDOG_RESET
#ifdef CONFIG_POST
initr_post_backlog,
#endif
INIT_FUNC_WATCHDOG_RESET
#if defined(CONFIG_PCI) && defined(CONFIG_SYS_EARLY_PCI_INIT)
/*
* Do early PCI configuration _before_ the flash gets initialised,
* because PCU resources are crucial for flash access on some boards.
*/
initr_pci,
#endif
#ifdef CONFIG_ARCH_EARLY_INIT_R
arch_early_init_r,
#endif
power_init_board,
#ifdef CONFIG_MTD_NOR_FLASH
initr_flash,
#endif
INIT_FUNC_WATCHDOG_RESET
#if defined(CONFIG_PPC) || defined(CONFIG_M68K) || defined(CONFIG_X86)
/* initialize higher level parts of CPU like time base and timers */
cpu_init_r,
#endif
#ifdef CONFIG_CMD_NAND
initr_nand,
#endif
#ifdef CONFIG_CMD_ONENAND
initr_onenand,
#endif
#ifdef CONFIG_MMC
initr_mmc,
#endif
initr_env,
#ifdef CONFIG_SYS_BOOTPARAMS_LEN
initr_malloc_bootparams,
#endif
INIT_FUNC_WATCHDOG_RESET
initr_secondary_cpu,
#if defined(CONFIG_ID_EEPROM) || defined(CONFIG_SYS_I2C_MAC_OFFSET)
mac_read_from_eeprom,
#endif
INIT_FUNC_WATCHDOG_RESET
#if defined(CONFIG_PCI) && !defined(CONFIG_SYS_EARLY_PCI_INIT)
/*
* Do pci configuration
*/
initr_pci,
#endif
stdio_add_devices,
initr_jumptable,
#ifdef CONFIG_API
initr_api,
#endif
console_init_r, /* fully init console as a device */
#ifdef CONFIG_DISPLAY_BOARDINFO_LATE
console_announce_r,
show_board_info,
#endif
#ifdef CONFIG_ARCH_MISC_INIT
arch_misc_init, /* miscellaneous arch-dependent init */
#endif
#ifdef CONFIG_MISC_INIT_R
misc_init_r, /* miscellaneous platform-dependent init */
#endif
INIT_FUNC_WATCHDOG_RESET
#ifdef CONFIG_CMD_KGDB
initr_kgdb,
#endif
interrupt_init,
#ifdef CONFIG_ARM
initr_enable_interrupts,
#endif
#if defined(CONFIG_MICROBLAZE) || defined(CONFIG_M68K)
timer_init, /* initialize timer */
#endif
#if defined(CONFIG_LED_STATUS)
initr_status_led,
#endif
/* PPC has a udelay(20) here dating from 2002. Why? */
#ifdef CONFIG_CMD_NET
initr_ethaddr,
#endif
#if defined(CONFIG_GPIO_HOG)
gpio_hog_probe_all,
#endif
#ifdef CONFIG_BOARD_LATE_INIT
board_late_init,
#endif
#if defined(CONFIG_SCSI) && !defined(CONFIG_DM_SCSI)
INIT_FUNC_WATCHDOG_RESET
initr_scsi,
#endif
#ifdef CONFIG_BITBANGMII
initr_bbmii,
#endif
#ifdef CONFIG_CMD_NET
INIT_FUNC_WATCHDOG_RESET
initr_net,
#endif
#ifdef CONFIG_POST
initr_post,
#endif
#if defined(CONFIG_IDE) && !defined(CONFIG_BLK)
initr_ide,
#endif
#ifdef CONFIG_LAST_STAGE_INIT
INIT_FUNC_WATCHDOG_RESET
/*
* Some parts can be only initialized if all others (like
* Interrupts) are up and running (i.e. the PC-style ISA
* keyboard).
*/
last_stage_init,
#endif
#ifdef CONFIG_CMD_BEDBUG
INIT_FUNC_WATCHDOG_RESET
initr_bedbug,
#endif
#if defined(CONFIG_PRAM)
initr_mem,
#endif
#if defined(CONFIG_M68K) && defined(CONFIG_BLOCK_CACHE)
blkcache_init,
#endif
run_main_loop,
};
此函数列表囊括了C语言实现的u-boot 几乎所有功能。通过函数名可大概了解到实现的功能
最后一个函数run_main_loop会跳转到main_loop中执行。
main_loop
代码路径: common/main.c
/* We come here after U-Boot is initialised and ready to process commands */
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
if (IS_ENABLED(CONFIG_VERSION_VARIABLE))
env_set("ver", version_string); /* set version variable */
cli_init();
if (IS_ENABLED(CONFIG_USE_PREBOOT))
run_preboot_environment_command();
if (IS_ENABLED(CONFIG_UPDATE_TFTP))
update_tftp(0UL, NULL, NULL);
s = bootdelay_process();
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);
cli_loop();
panic("No CLI available");
}
bootstage_mark_name设置当前状态为main_loop
设置环境变量env
run_preboot_environment_command 运行环境变量preboot所定义的命令
如果定义了CONFIG_UPDATE_TFTP则通过tftp下在filename到某个地址然后将其烧录到flash中
bootdelay_process 从环境变量bootdelay获取需要等待多少时间,超时时间内没有字符键入则 从环境变量bootcmd中获取对应的命令然后执行
至此u-boot结束它的生命周期,控制权交由kernel
2.2.4.3. 移植u-boot
安装依赖库
sudo apt-get install build-essential
sudo apt-get install libncurses5-dev
添加开发板对应的板级文件
copy板级文件目录
cp board/ti cp board/holo_ark
修改目录下的.c文件命名
mv evm.c board.c
修改目录下对应的Makefile
obj-y += board.o
修改目录下对应Kconfig
例如:
if TARGET_X3
config SYS_BOARD ##SYS_BOARD对应board目录下的板子类型
default "x3"
config SYS_VENDOR ##SYS_VENDOR代表board下的文件夹,例如holomatic,则在编译的时候会选择board/holomatic文件夹
default "holomatic"
config SYS_SOC ##SYS_SOC代表SOC类型
default "x3"
config SYS_CONFIG_NAME ##SYS_CONFIG_NAME代表include/configs目录下的头文件
default "holo_j3"
endif
修改Kconfig可改变图形界面选项,以及对应的配置信息
修改arch/arm/Kconfig
source "board/holomatic/x3/Kconfig"
移植配置文件
cd configs
cp j721e_evm_a72_defconfig holo_ark_a72_defconfig
#修改XX_defconfig文件
CONFIG_ARM=y
CONFIG_ENV_SIZE=0x20000
CONFIG_ENV_OFFSET=0x680000
...
修改开发板对应的头文件
cd include/configs
cp j721e_evm.h holo_ark_v3.h
#修改.h的重复检测宏
#ifndef __HOLO_ARK_V3_H
#define __HOLO_ARK_V3_H
#define CONFIG_SYS_SPL_MALLOC_START 0x84000000
#define CONFIG_SYS_SPL_MALLOC_SIZE SZ_16M
#define EXTRA_ENV_J721E_BOARD_SETTINGS
...
驱动修改
bootcmd
环境变量的默认值定义在include/env_default.h中
"bootcmd=" CONFIG_BOOTCOMMAND
CONFIG_BOOTCOMMAND 在include/environment/ti/boot.h中定义
2.2.4.4. u-boot命令总结
环境变量相关
printenv
setenv
saveenv
内存操作相关
md[.b,.w,.l] address
nm[.b,.w,.l] address
mm[.b,.w,.l] address
mw[.b,.w,.l] address value [count]
cp[.b,.w,.l] source target count
cmp[.b,.w,.l] addr1 addr2 count
网络相关
setenv ipaddr 192.168.1.2
setenv ethaddr 20:21:01:08:17:33
setenv gatewayip 192.168.1.1
setenv netmask 255.255.255.0
setenv serverip 192.168.1.11
saveenv
ping 192.168.1.11
dhcp
nfs [loadAddress] [[hostIpaddr:]bootfilename]
nfs 80800000 192.168.1.11:/home/zImage
tftpboot [loadAddress] [[hostIpaddr:]bootfilename]
ftftp 80800000 zImage
mmc 操作命令
mmc info
mmc rescan
mmc list
mmc dev [dev] [part]
mmc part
更详细的命令可以通过 help 查看