6.5.2. H264结构
H.264原始码流是由一个个的NALU组成,它的功能分为两层, VCL(视频编码层) 和 NAL(网络提取层)
---------------+-----------------------------------------------------------------------------
| H.264 | VAL(Video Coding Layer) + NAL(Network Abstraction Layer) |
---------------+-----------------------------------------------------------------------------
VCL: 进行视频编解码,包括预测(帧内预测和帧间预测),DCT变化和量化,墒编码和切分数据等功能,是为了实现更高的视频压缩比
NAL: 负责以网络所要求的恰当方式对VCL数据进行打包和传送
VCL是管理h264的视频数据层,是为了实现更高的视频压缩比,抛开H264压缩算法细节来看就3步
压缩: 预测(帧内预测和帧间预测)—–>DCT变化和量化———>比特流编码
切分数据
压缩切分后的VCL数据会包装成为NAL的一部分
6.5.2.1. 网络提取层(NAL)
NAL(Network Abstraction Layer),这块和H264的压缩算法无关,设计NAL的目的就是为了实现良好的网络亲和性,即适用于各种传输网络
NAL的组成单元是NALU
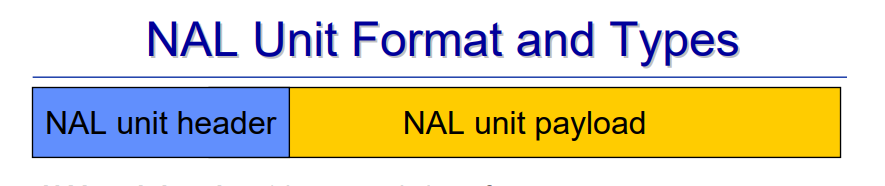
header: 一般存储标志信息,比如NALU的类型.NAL会打包VCL数据,但这并不意味着所有的NALU负载都是VCL
payload: 存储了真正的数据
6.5.2.1.1. NALU Header
NALU只占一个字节,即8位
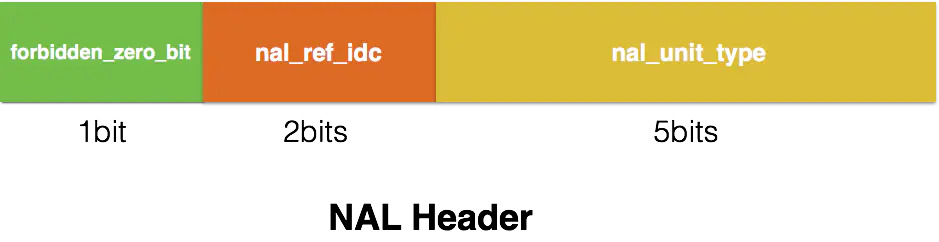
forbidden_zero_bit: 在网络传输中发生错误时,会被置为1,告诉接收方丢弃该单元
nal_ref_idc: 用于表示当前NALU的重要性,值越大,越重要
nal_unit_type: 表示NALU的数据类型
Nal_unit_type |
NAL |
0 |
未使用 |
1 |
不区分,非IDR图像的片 |
2 |
编码slice数据划分A(一般不会用到) |
3 |
编码slice数据划分B(一般不会用到) |
4 |
编码slice数据划分C(一般不会用到) |
5 |
IDR图像中的片 |
6 |
补充增强信息单元(SEI) |
7 |
序列参数集(SPS) |
8 |
图像参数集(PPS) |
9 |
分界符 |
10 |
序列结束 |
11 |
码流结束 |
12 |
填充 |
13~23 |
保留 |
24~31 |
未使用 |
6.5.2.1.2. SPS语法元素及其含义
SPS中的信息至关重要,如果其中的数据丢失或出现错误,那么解码过程可能会导致失败.
SPS(Sequence Paramater Set),称为序列参数集,SPS中保存了一组编码视频序列的全局参数.所谓的编码视频序列即原始视频的一帧一帧 的像素数据经过编码之后的结构组成的序列.一般情况下SPS和PPS的NALU单元通常位于整个码流的起始位置,但网络直播中一般每个I帧前面会带SPS和PPS信息
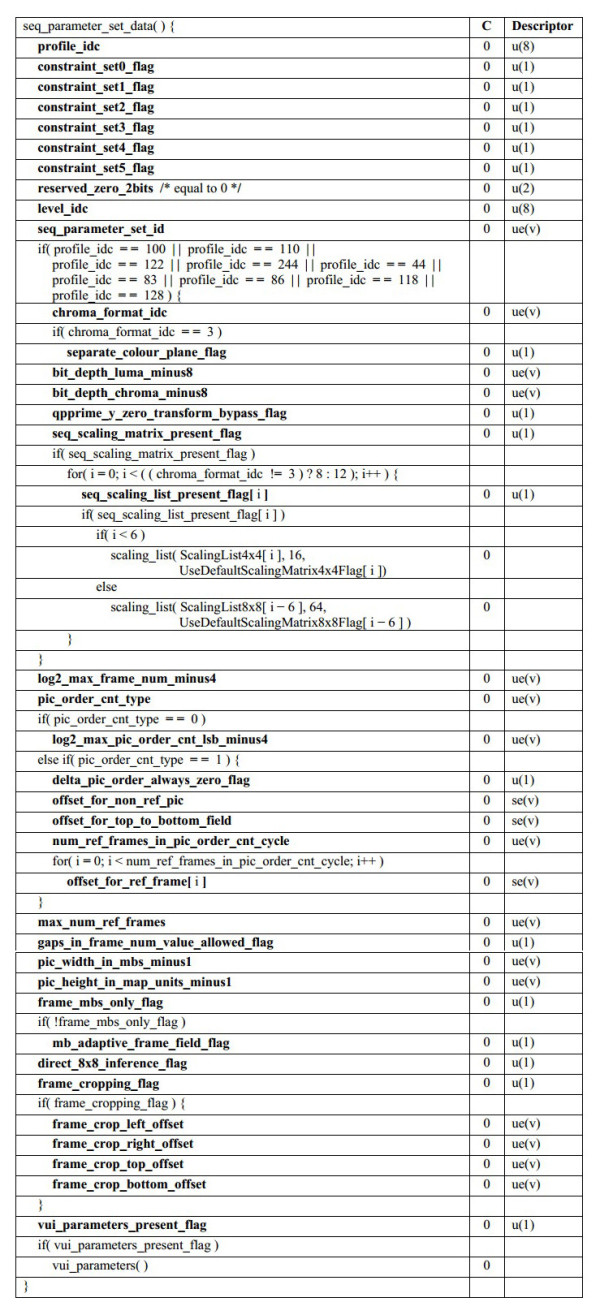
profile_idc: 标识当前码流的profile: 基准档次(baseline profile), 主要档次(main profile), 扩展档次(extended profile)
level_idc: 当前码流的level. 编码的level定义了某种条件下的最大视频分辨率,最大视频帧率等参数
seq_parameter_set_id: 表示当前序列参数集的id,通过该id值,图像参数集pps可以引用其代表的sps中的参数
log2_max_frame_num_minus4: 用于计算MaxFrameNum的值.计算公式为MaxFrameNum=2^(log2_max_frame_num_minus4 + 4). MaxFrameNum是frame_num的上限值,frame_num是 图像序号的一种表示方法,在帧间编码中常作为一种参考帧标记的手段
pic_order_cnt_type: 表示解码picture order count(POC)的方法,POC是另一种计量图像序号的方式,与frame_num有着不同的计算方法.该语法元素的取值为0, 1, 2
log2_max_oic_order_cnt_lsb_minus4: 用于计算MaxPicOrderCntLsb的值,该值表示POC的上限.计算方法为MaxPicOrderCntLsb=2^(log2_max_pic_order_cnt_lsb_minus4 + 4)
max_num_ref_frames: 用于表示参考帧的最大数目
gaps_in_frame_num_value_allowed_flag: 标识位,说明frame_num中是否允许不连续的值
pic_width_in_mbs_minus1: 用于计算图像的宽度,单位为宏块的个数,图像实际宽度为: frame_width = 16 * (pic_width_in_mbs_minus1 + 1)
pic_height_in_map_units_minus1: 使用PicHeightInMapUnit来度量视频中一帧图像的高度
frame_mbs_only_flag: 说明宏块的编码方式,0时宏块可能为帧编码或场编码,1时所有宏块采用帧编码
mb_adaptive_frame_field_flag: 标识位,说明是否采用宏块级的帧场自适应编码,该标识位为0时,不存在帧编码和场编码之间的切换.为1时,宏块可能在帧编码 和场编码之间进行选择
direct_8x8_inference_flag: 标识位,用于B_Skip, B_Direct模式运动矢量的推导计算
frame_cropping_flag: 标识位,说明是否需要对图像帧进行裁剪
vui_parameters_present_flag: 标识位,说明SPS中是否存在VUI信息
6.5.2.1.3. PPS语法元素及其含义
封装格式中,PPS通常与SPS一起保存在视频文件的文件头中
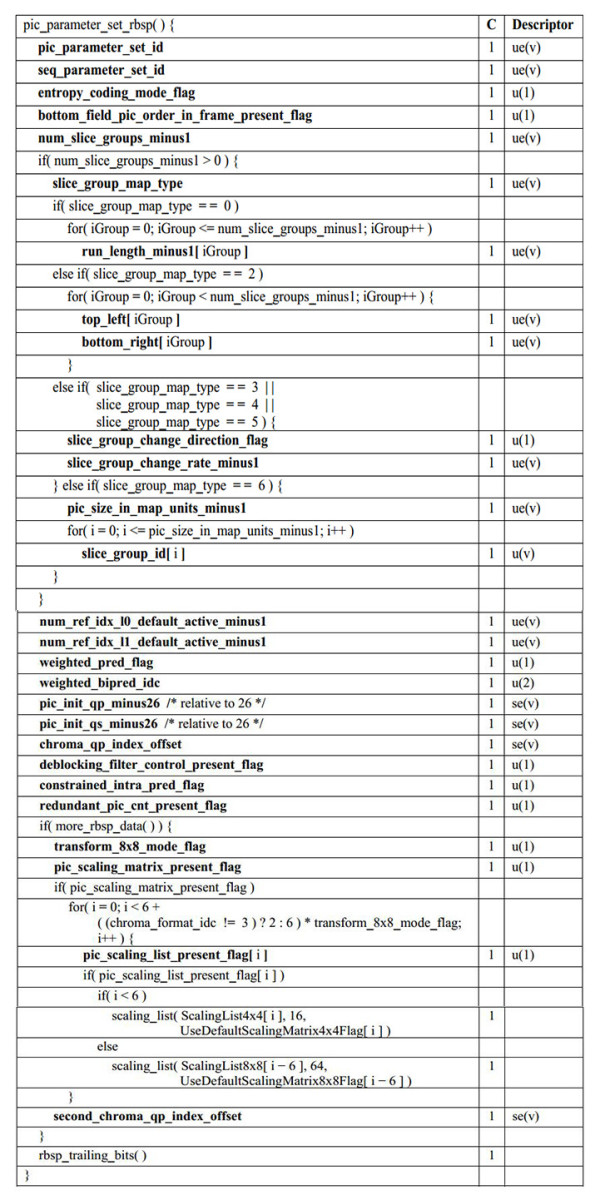
pic_parameter_set_id: